Self-Balancing Bot
Structural and Product Design to obtain Self-Balance
TL;DR
Problem:
To develop a prototype of a mordern day segway with an emphasis on high stability.
Solution:
The Self-Balancing Bot is a small prototype that mimics the behaviour of the mordern day Segway, which an acute emphasis given on the structural design – a vital component in ensure self balance

What I learned
Problem Domain
Problem :-
With an increasing demand for reduction of CO2 emissions and the desire to reduce city traffic, the transportation sector puts more money than ever into developing environmentally friendly vehicles. This includes to look for different solutions to transportation, such as the segway, hybrid vehicles technology or fully electric vehicles.
Scope :-
The self-balancing bot attempts to stabilize the balance point within an autonomous two wheeled structure. In order to achieve this stability, a PI-PD dual cascaded control system is used, with either block controlling the speed and stability of the bot.
 
My Role :-
My role as a UX Designer consisted of design and development of the structural body, I facilitated most of the design process alongwith providing an aesthetic exterior texture. I also helped in developing the algorithm of the control system.
Type:
Group Project
Members:
S Jaswanth, P Harshitha, Saneesh Cleatus, Sharan Hegde
Timeline:
8 months ( Oct 2016 – May 2017)
Tools Used:
3D Modelling, 3D Builder, Arduino, Structural Design strategies
Initial Research
To better understand the mechanics behind a self-balancing bot, we dived into research papers from IEEE and Springer to better understand the specifics about the inverted pendulum-which serves as the basis of the self-balancing bot.
Our findings bought us to 3 primary concerns that is vital to attain self-balance:
- The length of the body will in turn extend the point of gravity upwards, hence wheels of larger diameters is required.
- The motors running the wheels should be fast enough to ensure tilt adjustments are done in real-time.
- For external control, a suitable mobile application should be created/downloaded.
Ideation
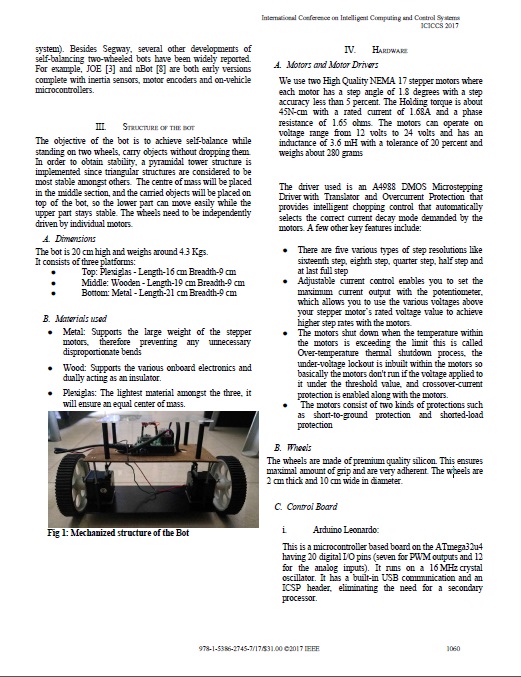
Based on conceptual and sketched out designs, we had to finalize on required body structure that is best suited for maintaining a low center of gravity.
After alot of brainstorming, we narrowed down our scope to body structure best suited for balance:
1. Single Storey/ Stacked Storey model gives the added benefit of simplicity of structure alongwith maintaining a low center of gravity
2. Pyramidal structure model uses the triangular equal weight distribution idea with the added benefit of aesthetic visuals.

Design 1

Design 2
Design & Engineering
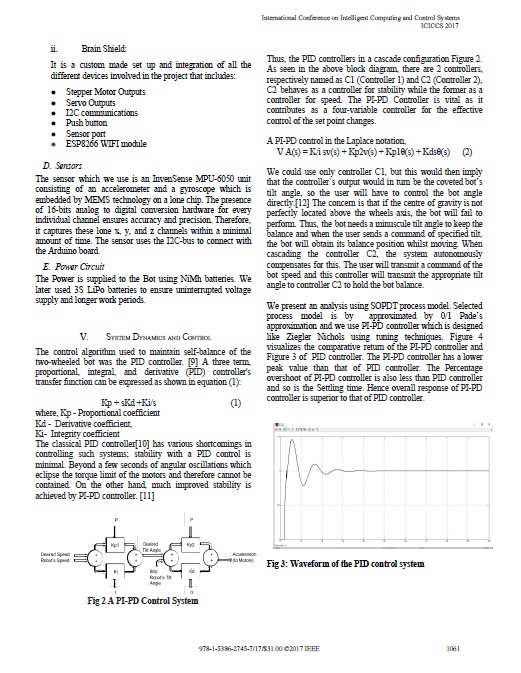
Control System
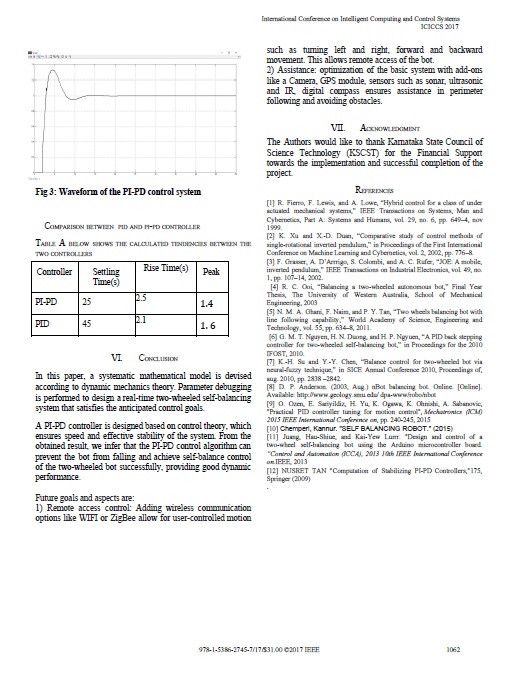
implemented a PI-PD controller which progressively maintains balance and speed. Below is flow diagram into the working of the control system.

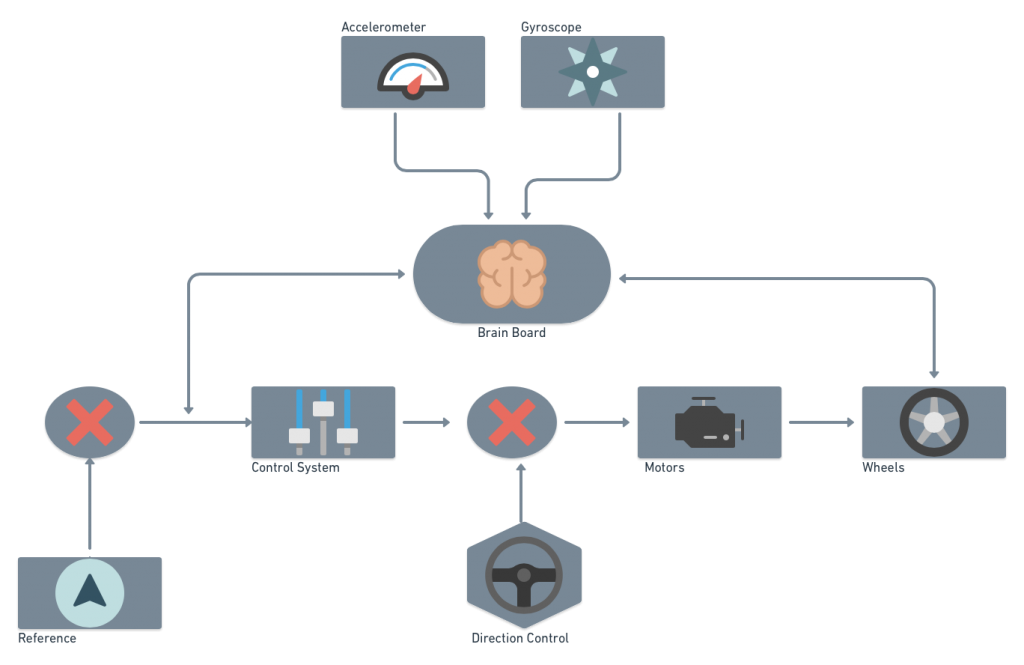
Block Diagram
Once we have configured the Control System, we designed the system to provide a feedback loop in order to minimize the error output. The Block Diagram below gives a low-level view of the system:
Hardware Components
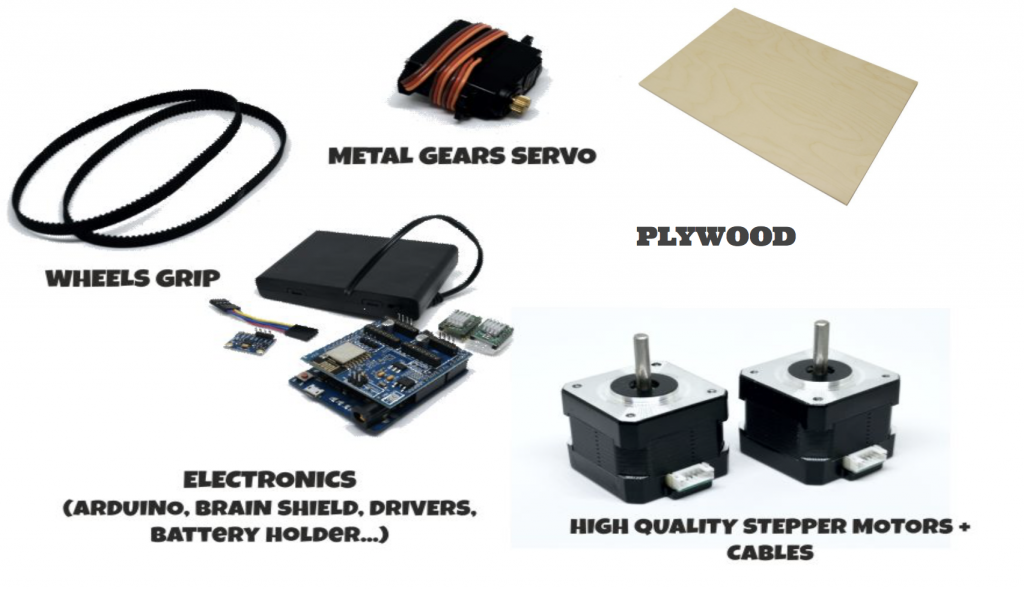
The components that are vital to the system are:
- MPU-6050
- Arduino Leonardo
- Brain Shield
- L298N Dual H Bridge
- Stepper Motors.
In addition to the ones above, we also use SPST switches, 8V Lithium batteries, IR Detectors, Plywood for bot structure etc.
Initial Prototype
The initial prototype was made entirely of Plexiglas with low powered stepper motors. Although the program was perfoming optimally, the structure of the body prevent further movement of the bot. Thus failing to achieve the goal of self balance. The following was noted for its failure:
- Elongated body lead to a higher point of gravity.
- The placement of the energy system on the top half lead to structural instability.
- The energy system was underpowered.
- Stepper motors were of insufficient parameters.

Initial Prototype View #1

Initial Prototype View #2
Final Prototype


Test
Real-World Applications
The Unmanned 2 wheeled Robotic Mobility Assistance using Feedback Linearization finds applications in:
- The major vehicular industries, to promote a more eased and economical method of short distance travel.
- The Medical Electronics industry, to promote a more economical and fluidic approach to support the disabled.
- Easier and a more mobile walking device that will support the movement of the blind around their surroundings using obstacle detection protocol.
- In Military and Security, Navigation of rescued humans around the disaster struck areas.
Presentation
We presented this project to professors from the Indian Institute of Sciences (IISc) during the Karnataka State Council for Science and Technology (KSCST) – 2017 Bengaluru Edition. We also subsequently received funding from KSCST to further build on our project.
Currently, we are building up on the bot repository to ensure a smoother self balance movement.
Furthermore, the result of our findings were showcased during the 2017 IEEE International Conference on Intelligent Computing and Control Systems. The screenshots which can be seen below.